Stages of Auto DevOps (FREE)
The following sections describe the stages of Auto DevOps. Read them carefully to understand how each one works.
Auto Build
NOTE: Auto Build is not supported if Docker in Docker is not available for your GitLab Runners, like in OpenShift clusters. The OpenShift support in GitLab is tracked in a dedicated epic.
Auto Build creates a build of the application using an existing Dockerfile or
Heroku buildpacks. The resulting Docker image is pushed to the
Container Registry, and tagged
with the commit SHA or tag.
Auto Build using a Dockerfile
If a project's repository contains a Dockerfile at its root, Auto Build uses
docker build to create a Docker image.
If you're also using Auto Review Apps and Auto Deploy, and you choose to provide
your own Dockerfile, you must either:
- Expose your application to port
5000, as the default Helm chart assumes this port is available. - Override the default values by customizing the Auto Deploy Helm chart.
Auto Build using Cloud Native Buildpacks
- Introduced in GitLab 12.10.
- Auto Build using Cloud Native Buildpacks by default was introduced in GitLab 14.0.
Auto Build builds an application using a project's Dockerfile if present. If no
Dockerfile is present, Auto Build builds your application using
Cloud Native Buildpacks to detect and build the
application into a Docker image. The feature uses the
pack command.
The default builder
is heroku/buildpacks:18 but a different builder can be selected using
the CI/CD variable AUTO_DEVOPS_BUILD_IMAGE_CNB_BUILDER.
Each buildpack requires your project's repository to contain certain files for Auto Build to build your application successfully. The structure is specific to the builder and buildpacks you have selected. For example, when using the Heroku's builder (the default), your application's root directory must contain the appropriate file for your application's language:
- For Python projects, a
Pipfileorrequirements.txtfile. - For Ruby projects, a
GemfileorGemfile.lockfile.
For the requirements of other languages and frameworks, read the Heroku buildpacks documentation.
NOTE: Auto Test still uses Herokuish, as test suite detection is not yet part of the Cloud Native Buildpack specification. For more information, see this issue.
Mount volumes into the build container
- Introduced in GitLab 14.2.
- Multiple volume support (or
auto-build-imagev1.6.0) introduced in GitLab 14.6.
The variable BUILDPACK_VOLUMES can be used to pass volume mount definitions to the
pack command. The mounts are passed to pack build using --volume arguments.
Each volume definition can include any of the capabilities provided by build pack
such as the host path, the target path, whether the volume is writable, and
one or more volume options.
Use a pipe | character to pass multiple volumes.
Each item from the list is passed to build back using a separate --volume argument.
In this example, three volumes are mounted in the container as /etc/foo, /opt/foo, and /var/opt/foo:
buildjob:
variables:
BUILDPACK_VOLUMES: /mnt/1:/etc/foo:ro|/mnt/2:/opt/foo:ro|/mnt/3:/var/opt/foo:rwRead more about defining volumes in the pack build documentation.
Auto Build using Herokuish
Replaced with Cloud Native Buildpacks in GitLab 14.0.
Prior to GitLab 14.0, Herokuish was
the default build method for projects without a Dockerfile. Herokuish can
still be used by setting the CI/CD variable AUTO_DEVOPS_BUILD_IMAGE_CNB_ENABLED
to false.
NOTE:
If Auto Build fails despite the project meeting the buildpack requirements, set
a project CI/CD variable TRACE=true to enable verbose logging, which may help you
troubleshoot.
Moving from Herokuish to Cloud Native Buildpacks
Builds using Cloud Native Buildpacks support the same options as builds using Herokuish, with the following caveats:
- The buildpack must be a Cloud Native Buildpack. A Heroku buildpack can be
converted to a Cloud Native Buildpack using Heroku's
cnb-shim. -
BUILDPACK_URLmust be in a format supported bypack. - The
/bin/herokuishcommand is not present in the built image, and prefixing commands with/bin/herokuish procfile execis no longer required (nor possible). Instead, custom commands should be prefixed with/cnb/lifecycle/launcherto receive the correct execution environment.
Auto Test
Auto Test runs the appropriate tests for your application using Herokuish and Heroku buildpacks by analyzing your project to detect the language and framework. Several languages and frameworks are detected automatically, but if your language is not detected, you may be able to create a custom buildpack. Check the currently supported languages.
Auto Test uses tests you already have in your application. If there are no tests, it's up to you to add them.
NOTE: Not all buildpacks supported by Auto Build are supported by Auto Test. Auto Test uses Herokuish, not Cloud Native Buildpacks, and only buildpacks that implement the Testpack API are supported.
Currently supported languages
Note that not all buildpacks support Auto Test yet, as it's a relatively new enhancement. All of Heroku's officially supported languages support Auto Test. The languages supported by Heroku's Herokuish buildpacks all support Auto Test, but notably the multi-buildpack does not.
The supported buildpacks are:
- heroku-buildpack-multi
- heroku-buildpack-ruby
- heroku-buildpack-nodejs
- heroku-buildpack-clojure
- heroku-buildpack-python
- heroku-buildpack-java
- heroku-buildpack-gradle
- heroku-buildpack-scala
- heroku-buildpack-play
- heroku-buildpack-php
- heroku-buildpack-go
- buildpack-nginxIf your application needs a buildpack that is not in the above list, you might want to use a custom buildpack.
Auto Code Quality
- Moved from GitLab Starter to GitLab Free in 13.2.
Auto Code Quality uses the Code Quality image to run static analysis and other code checks on the current code. After creating the report, it's uploaded as an artifact which you can later download and check out. The merge request widget also displays any differences between the source and target branches.
Auto SAST
- Introduced in GitLab Ultimate 10.3.
- Select functionality made available in all tiers beginning in 13.1
Static Application Security Testing (SAST) runs static analysis on the current code, and checks for potential security issues. The Auto SAST stage requires GitLab Runner 11.5 or above.
After creating the report, it's uploaded as an artifact which you can later download and check out. The merge request widget also displays any security warnings on Ultimate licenses.
To learn more about how SAST works, see the documentation.
Auto Secret Detection
- Introduced in GitLab 13.1.
- Select functionality made available in all tiers in GitLab 13.3
Secret Detection uses the Secret Detection Docker image to run Secret Detection on the current code, and checks for leaked secrets. Auto Secret Detection requires GitLab Runner 11.5 or above.
After creating the report, it's uploaded as an artifact which you can later download and evaluate. The merge request widget also displays any security warnings on Ultimate licenses.
To learn more, see Secret Detection.
Auto Dependency Scanning (ULTIMATE)
Dependency Scanning runs analysis on the project's dependencies and checks for potential security issues. The Auto Dependency Scanning stage is skipped on licenses other than Ultimate and requires GitLab Runner 11.5 or above.
After creating the report, it's uploaded as an artifact which you can later download and check out. The merge request widget displays any security warnings detected,
To learn more about Dependency Scanning, see the documentation.
Auto License Compliance (ULTIMATE)
Introduced in GitLab 11.0.
License Compliance uses the License Compliance Docker image to search the project dependencies for their license. The Auto License Compliance stage is skipped on licenses other than Ultimate.
After creating the report, it's uploaded as an artifact which you can later download and check out. The merge request displays any detected licenses.
To learn more about License Compliance, see the documentation.
Auto Container Scanning (ULTIMATE)
Vulnerability static analysis for containers uses Trivy to check for potential security issues in Docker images. The Auto Container Scanning stage is skipped on licenses other than Ultimate.
After creating the report, it's uploaded as an artifact which you can later download and check out. The merge request displays any detected security issues.
To learn more about Container Scanning, see the documentation.
Auto Review Apps
This is an optional step, since many projects don't have a Kubernetes cluster available. If the requirements are not met, the job is silently skipped.
Review Apps are temporary application environments based on the branch's code so developers, designers, QA, product managers, and other reviewers can actually see and interact with code changes as part of the review process. Auto Review Apps create a Review App for each branch.
Auto Review Apps deploy your application to your Kubernetes cluster only. If no cluster is available, no deployment occurs.
The Review App has a unique URL based on a combination of the project ID, the branch
or tag name, a unique number, and the Auto DevOps base domain, such as
13083-review-project-branch-123456.example.com. The merge request widget displays
a link to the Review App for easy discovery. When the branch or tag is deleted,
such as after merging a merge request, the Review App is also deleted.
Review apps are deployed using the auto-deploy-app chart with Helm, which you can customize. The application deploys into the Kubernetes namespace for the environment.
In GitLab 11.4 and later, local Tiller is used. Previous versions of GitLab had a Tiller installed in the project namespace.
WARNING: Your apps should not be manipulated outside of Helm (using Kubernetes directly). This can cause confusion with Helm not detecting the change and subsequent deploys with Auto DevOps can undo your changes. Also, if you change something and want to undo it by deploying again, Helm may not detect that anything changed in the first place, and thus not realize that it needs to re-apply the old configuration.
Auto DAST (ULTIMATE)
Dynamic Application Security Testing (DAST) uses the popular open source tool OWASP ZAProxy to analyze the current code and check for potential security issues. The Auto DAST stage is skipped on licenses other than Ultimate.
- On your default branch, DAST scans an application deployed specifically for that purpose unless you override the target branch. The app is deleted after DAST has run.
- On feature branches, DAST scans the review app.
After the DAST scan completes, any security warnings are displayed on the Security Dashboard and the merge request widget.
To learn more about Dynamic Application Security Testing, see the documentation.
Overriding the DAST target
To use a custom target instead of the auto-deployed review apps,
set a DAST_WEBSITE CI/CD variable to the URL for DAST to scan.
WARNING:
If DAST Full Scan is
enabled, GitLab strongly advises not
to set DAST_WEBSITE to any staging or production environment. DAST Full Scan
actively attacks the target, which can take down your application and lead to
data loss or corruption.
Disabling Auto DAST
You can disable DAST:
- On all branches by setting the
DAST_DISABLEDCI/CD variable to"true". - Only on the default branch by setting the
DAST_DISABLED_FOR_DEFAULT_BRANCHvariable to"true". - Only on feature branches by setting
REVIEW_DISABLEDvariable to"true". This also disables the Review App.
Auto Browser Performance Testing (PREMIUM)
Introduced in GitLab 10.4.
Auto Browser Performance Testing
measures the browser performance of a web page with the
Sitespeed.io container,
creates a JSON report including the overall performance score for each page, and
uploads the report as an artifact. By default, it tests the root page of your Review and
Production environments. If you want to test additional URLs, add the paths to a
file named .gitlab-urls.txt in the root directory, one file per line. For example:
/
/features
/directionAny browser performance differences between the source and target branches are also shown in the merge request widget.
Auto Load Performance Testing (PREMIUM)
Introduced in GitLab 13.2.
Auto Load Performance Testing measures the server performance of an application with the k6 container, creates a JSON report including several key result metrics, and uploads the report as an artifact.
Some initial setup is required. A k6 test needs to be written that's tailored to your specific application. The test also needs to be configured so it can pick up the environment's dynamic URL via a CI/CD variable.
Any load performance test result differences between the source and target branches are also shown in the merge request widget.
Auto Deploy
Introduced in GitLab 13.6, you have the choice to deploy to Amazon Elastic Compute Cloud (Amazon EC2) in addition to a Kubernetes cluster.
Auto Deploy is an optional step for Auto DevOps. If the requirements are not met, the job is skipped.
After a branch or merge request is merged into the project's default branch, Auto Deploy deploys the application to a production environment in
the Kubernetes cluster, with a namespace based on the project name and unique
project ID, such as project-4321.
Auto Deploy does not include deployments to staging or canary environments by default, but the Auto DevOps template contains job definitions for these tasks if you want to enable them.
You can use CI/CD variables to automatically
scale your pod replicas, and to apply custom arguments to the Auto DevOps helm upgrade
commands. This is an easy way to
customize the Auto Deploy Helm chart.
Helm uses the auto-deploy-app chart to deploy the application into the Kubernetes namespace for the environment.
In GitLab 11.4 and later, a local Tiller is used. Previous versions of GitLab had a Tiller installed in the project namespace.
WARNING: Your apps should not be manipulated outside of Helm (using Kubernetes directly). This can cause confusion with Helm not detecting the change and subsequent deploys with Auto DevOps can undo your changes. Also, if you change something and want to undo it by deploying again, Helm may not detect that anything changed in the first place, and thus not realize that it needs to re-apply the old configuration.
WARNING:
GitLab 14.0 renews the Auto Deploy template.
This might cause an unexpected failure on your Auto DevOps project due to the breaking changes on
the v2 auto-deploy-image. Follow the upgrade guide
to upgrade your environments before upgrading to GitLab 14.0.
GitLab deploy tokens
Introduced in GitLab 11.0.
GitLab Deploy Tokens are created for internal and private projects when Auto DevOps is enabled, and the Auto DevOps settings are saved. You can use a Deploy Token for permanent access to the registry. After you manually revoke the GitLab Deploy Token, it isn't automatically created.
If the GitLab Deploy Token can't be found, CI_REGISTRY_PASSWORD is
used.
NOTE:
CI_REGISTRY_PASSWORD is only valid during deployment. Kubernetes can
successfully pull the container image during deployment, but if the image must
be pulled again, such as after pod eviction, Kubernetes cannot do so
as it attempts to fetch the image using CI_REGISTRY_PASSWORD.
Kubernetes 1.16+
- Introduced in GitLab 12.8.
- Support for deploying a PostgreSQL version that supports Kubernetes 1.16+ was introduced in GitLab 12.9.
- Supported out of the box for new deployments as of GitLab 13.0.
WARNING:
The default value for the deploymentApiVersion setting was changed from
extensions/v1beta to apps/v1 in GitLab 13.0.
In Kubernetes 1.16 and later, a number of
APIs were removed,
including support for Deployment in the extensions/v1beta1 version.
To use Auto Deploy on a Kubernetes 1.16+ cluster:
-
If you are deploying your application for the first time in GitLab 13.0 or later, no configuration should be required.
-
In GitLab 12.10 and earlier, set the following in the
.gitlab/auto-deploy-values.yamlfile:deploymentApiVersion: apps/v1 -
If you have an in-cluster PostgreSQL database installed with
AUTO_DEVOPS_POSTGRES_CHANNELset to1, follow the guide to upgrade PostgreSQL. -
If you are deploying your application for the first time and are using GitLab 12.9 or 12.10, set
AUTO_DEVOPS_POSTGRES_CHANNELto2.
WARNING:
In GitLab 12.9 and 12.10, opting into
AUTO_DEVOPS_POSTGRES_CHANNEL version 2 deletes the version 1 PostgreSQL
database. Follow the guide to upgrading PostgreSQL
to back up and restore your database before opting into version 2 (On
GitLab 13.0, an additional CI/CD variable is required to trigger the database
deletion).
Migrations
Introduced in GitLab 11.4
You can configure database initialization and migrations for PostgreSQL to run
within the application pod by setting the project CI/CD variables DB_INITIALIZE and
DB_MIGRATE respectively.
If present, DB_INITIALIZE is run as a shell command within an application pod
as a Helm post-install hook. As some applications can't run without a successful
database initialization step, GitLab deploys the first release without the
application deployment, and only the database initialization step. After the database
initialization completes, GitLab deploys a second release with the application
deployment as normal.
Note that a post-install hook means that if any deploy succeeds,
DB_INITIALIZE isn't processed thereafter.
If present, DB_MIGRATE is run as a shell command within an application pod as
a Helm pre-upgrade hook.
For example, in a Rails application in an image built with Cloud Native Buildpacks:
-
DB_INITIALIZEcan be set toRAILS_ENV=production /cnb/lifecycle/launcher bin/rails db:setup -
DB_MIGRATEcan be set toRAILS_ENV=production /cnb/lifecycle/launcher bin/rails db:migrate
Unless your repository contains a Dockerfile, your image is built with
Cloud Native Buildpacks, and you must prefix commands run in these images with
/cnb/lifecycle/launcher, (or /bin/herokuish procfile exec when
using Herokuish)
to replicate the environment where your
application runs.
Upgrade auto-deploy-app Chart
You can upgrade the auto-deploy-app chart by following the upgrade guide.
Workers
Some web applications must run extra deployments for "worker processes". For example, Rails applications commonly use separate worker processes to run background tasks like sending emails.
The default Helm chart used in Auto Deploy has support for running worker processes.
To run a worker, you must ensure the worker can respond to
the standard health checks, which expect a successful HTTP response on port
5000. For Sidekiq, you can use
the sidekiq_alive gem.
To work with Sidekiq, you must also ensure your deployments have access to a Redis instance. Auto DevOps doesn't deploy this instance for you, so you must:
- Maintain your own Redis instance.
- Set a CI/CD variable
K8S_SECRET_REDIS_URL, which is the URL of this instance, to ensure it's passed into your deployments.
After configuring your worker to respond to health checks, run a Sidekiq
worker for your Rails application. You can enable workers by setting the
following in the .gitlab/auto-deploy-values.yaml file:
workers:
sidekiq:
replicaCount: 1
command:
- /cnb/lifecycle/launcher
- sidekiq
preStopCommand:
- /cnb/lifecycle/launcher
- sidekiqctl
- quiet
terminationGracePeriodSeconds: 60Network Policy
- Introduced in GitLab 12.7.
- Deprecated in GitLab 13.9.
By default, all Kubernetes pods are non-isolated, and accept traffic to and from any source. You can use NetworkPolicy to restrict connections to and from selected pods, namespaces, and the Internet.
NOTE:
You must use a Kubernetes network plugin that implements support for
NetworkPolicy. The default network plugin for Kubernetes (kubenet)
does not implement
support for it. The Cilium network plugin can be
installed as a cluster application
to enable support for network policies.
You can enable deployment of a network policy by setting the following
in the .gitlab/auto-deploy-values.yaml file:
networkPolicy:
enabled: trueThe default policy deployed by the Auto Deploy pipeline allows
traffic within a local namespace, and from the gitlab-managed-apps
namespace. All other inbound connections are blocked. Outbound
traffic (for example, to the Internet) is not affected by the default policy.
You can also provide a custom policy specification
in the .gitlab/auto-deploy-values.yaml file, for example:
networkPolicy:
enabled: true
spec:
podSelector:
matchLabels:
app.gitlab.com/env: staging
ingress:
- from:
- podSelector:
matchLabels: {}
- namespaceSelector:
matchLabels:
app.gitlab.com/managed_by: gitlabFor more information on installing Network Policies, see Use the Cluster Management Template to Install Cilium.
Cilium Network Policy
Introduced in GitLab 13.9.
By default, all Kubernetes pods are non-isolated, and accept traffic to and from any source. You can use CiliumNetworkPolicy to restrict connections to and from selected pods, namespaces, and the internet.
Requirements
As the default network plugin for Kubernetes (kubenet)
does not implement
support for it, you must have Cilium as your Kubernetes network plugin.
The Cilium network plugin can be installed with a cluster management project template to enable support for network policies.
Configuration
You can enable deployment of a network policy by setting the following
in the .gitlab/auto-deploy-values.yaml file:
ciliumNetworkPolicy:
enabled: trueThe default policy deployed by the Auto Deploy pipeline allows
traffic within a local namespace, and from the gitlab-managed-apps
namespace. All other inbound connections are blocked. Outbound
traffic (for example, to the internet) is not affected by the default policy.
You can also provide a custom policy specification
in the .gitlab/auto-deploy-values.yaml file, for example:
ciliumNetworkPolicy:
enabled: true
spec:
endpointSelector:
matchLabels:
app.gitlab.com/env: staging
ingress:
- fromEndpoints:
- matchLabels:
app.gitlab.com/managed_by: gitlabEnabling Alerts
You can also enable alerts. Network policies with alerts are considered only if Agent has been integrated.
You can enable alerts as follows:
ciliumNetworkPolicy:
enabled: true
alerts:
enabled: trueFor more information on installing Network Policies, see Use the Cluster Management Template to Install Cilium.
Running commands in the container
Applications built with Auto Build using Herokuish, the default unless your repository contains a custom Dockerfile, may require commands to be wrapped as follows:
/bin/herokuish procfile exec $COMMANDSome of the reasons you may need to wrap commands:
- Attaching using
kubectl exec. - Using the GitLab Web Terminal.
For example, to start a Rails console from the application root directory, run:
/bin/herokuish procfile exec bin/rails cWhen using Cloud Native Buildpacks, instead of /bin/herokuish procfile exec, use
/cnb/lifecycle/launcher $COMMANDAuto Monitoring
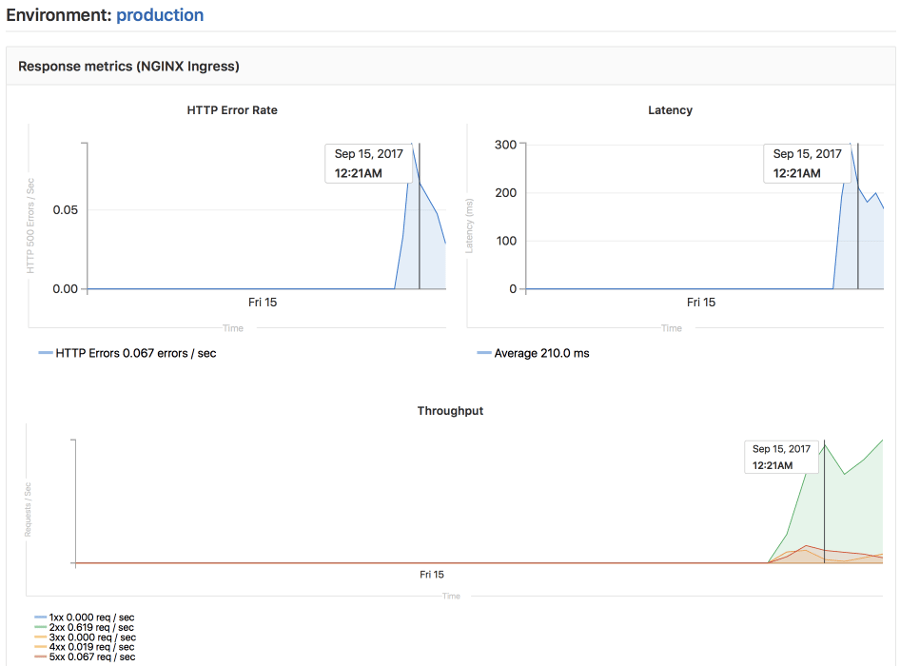
After your application deploys, Auto Monitoring helps you monitor your application's server and response metrics right out of the box. Auto Monitoring uses Prometheus to retrieve system metrics, such as CPU and memory usage, directly from Kubernetes, and response metrics, such as HTTP error rates, latency, and throughput, from the NGINX server.
The metrics include:
- Response Metrics: latency, throughput, error rate
- System Metrics: CPU utilization, memory utilization
To use Auto Monitoring:
- Install and configure the Auto DevOps requirements.
- Enable Auto DevOps, if you haven't done already.
- On the left sidebar, select CI/CD > Pipelines.
- Select Run pipeline.
- After the pipeline finishes successfully, open the monitoring dashboard for a deployed environment to view the metrics of your deployed application. To view the metrics of the whole Kubernetes cluster, on the left sidebar, select Monitor > Metrics.
Auto Code Intelligence
Introduced in GitLab 13.5.
GitLab code intelligence adds code navigation features common to interactive development environments (IDE), including type signatures, symbol documentation, and go-to definition. It's powered by LSIF and available for Auto DevOps projects using Go language only. GitLab plans to add support for more languages as more LSIF indexers become available. You can follow the code intelligence epic for updates.
This stage is enabled by default. You can disable it by adding the
CODE_INTELLIGENCE_DISABLED CI/CD variable. Read more about
disabling Auto DevOps jobs.